Założone zostało, iż stworzony zostanie system komputerowy, który w przeciwieństwie do metod symulacyjnych i rejestracji rzeczywistego ruchu pozwala na zmiany stylu animacji i uzyskanie animacji przejaskrawionej. Zweryfikowana została koncepcja wykorzystania logiki rozmytej do zamodelowania procesu subiektywnego oceniania i doboru wartości parametrów faz animacji. Inne cele pracy dotyczyły:
- Modelowanie reguł animacji w postaci reguł rozmytych
- Weryfikacja koncepcji wykorzystania logiki rozmytej w dziedzinie animacji
- Stworzenie systemu komputerowego, który uwzględnia zmiany stylu i pozwala na animację przejaskrawioną
- Przyspieszenie procesu animowania
System wspomagania animacji
Założenia
Założenia zrealizowanego systemu były następujące: na wejście podawane są animacje schematyczne, zawierające pozy i translacje (ruchy przejść) między nimi, bez faz dodatkowych. Aplikacja wzbogaca ruch o fazy dodatkowe a ruch uzależniony jest od oczekiwanego subiektywnego wydźwięku animacji określonego wcześniej przez użytkownika. Wynikowa jakość wizualna animacji jest wysoka. Rozpatrywane są cechy płynności i stylizacji animacji, ustalane poprzez podanie słownej wartości parametrów. System wykorzystuje logikę rozmytą w celu przetwarzania parametrów.
- Wejście: animacja „schematyczna” - od pozy do pozy
- Wzbogacenie animacji o fazy dodatkowe zgodnie z regułami animacji
- Możliwość zmiany subiektywnych cech animacji
- Płynność
- Stylizacja
- Wysoka jakość wizualna animacji
- Wnioskowanie rozmyte oparte na wiedzy wydobytej z reguł animacji
Model procesu realizacji animacji
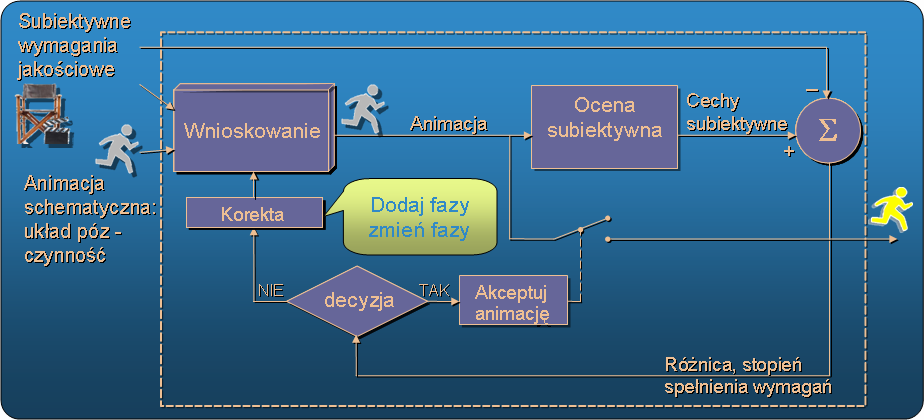
Zaprojektowany został model tradycyjnego procesu realizacji animacji. Wejściem do modelu są instrukcje reżysera: jaka ma być stylizacja ruchu, ile ma on trwać, gdzie się rozpocząć i gdzie zakończyć. Zadaniem animatora jest wykorzystać wiedzę do przygotowania roboczej wersji animacji, która jest następnie oceniana. Jeżeli wynik zbyt znacząco odbiega od założeń początkowych konieczne jest prowadzanie poprawek, dodawanie nowych faz ruchu, zmiany faz istniejących – tak długo, aż animacja spełni wymagania.
Model procesu realizacji animacji
Parametryzacja ruchu
Na potrzeby przetwarzania zaproponowano następujący sposób parametryzacji animowanego ruchu. Założone zostaje iż animacja przygotowana jest zgodnie z metodą „od pozy do pozy”, tzn. jeden segment animacji zawiera pozę, przejście i pozę docelową. Odpowiednie elementy ruchu pokazane są na poniższym rysunku. Ruch w fazie głównej opisać można parametrami prędkość V, amplituda A, czas trwania t. Fazy dodatkowe umieszczane są w animacji przed ruchem i po nim, oraz w zatrzymaniu. Są to tzw. fazy antycypacji, przerzutu i ruchomego zatrzymania. Założono, iż amplitudy i długości antycypacji i przerzutu są takie same, stąd też do opisu faz dodatkowych stosowane są tylko dwa parametry: dA i dt. W dalszej części wykorzystywane będą oznaczenia wektorów A i B dla "zgrupowania" parametrów faz głównych i dodatkowych. Na rysunku H oznacza zakres występowania losowych wychyleń od pozy docelowej, nazywanych ruchomym zatrzymaniem.
Podział segmentu animacji na pozy, translacje między nimi i fazy dodatkowe zgodnie z metodyką „od pozy do pozy”:
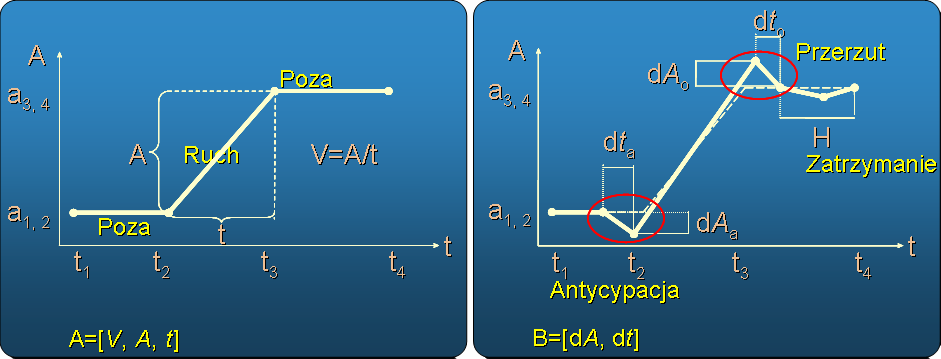
Parametryzacja faz ruchu
Reguły rozmyte
Model realizacji animacji uzupełniony o wprowadzone powyżej oznaczenia parametrów przedstawiony jest na rysunku. Wymagania jakościowe zawarte są w wektorze J, animacja schematyczna opisana jest wektorem A, zaś dodawane do animacji fazy wektorem B. Ocena subiektywna polega na przypisaniu wartościom parametrów A i B, wektora oceny J. To, w jaki sposób wykorzystywać fazy dodatkowe i jak dobierać wartości parametrów z wektora B dla animacji opisanej przez A, określane jest przez reguły animacji.
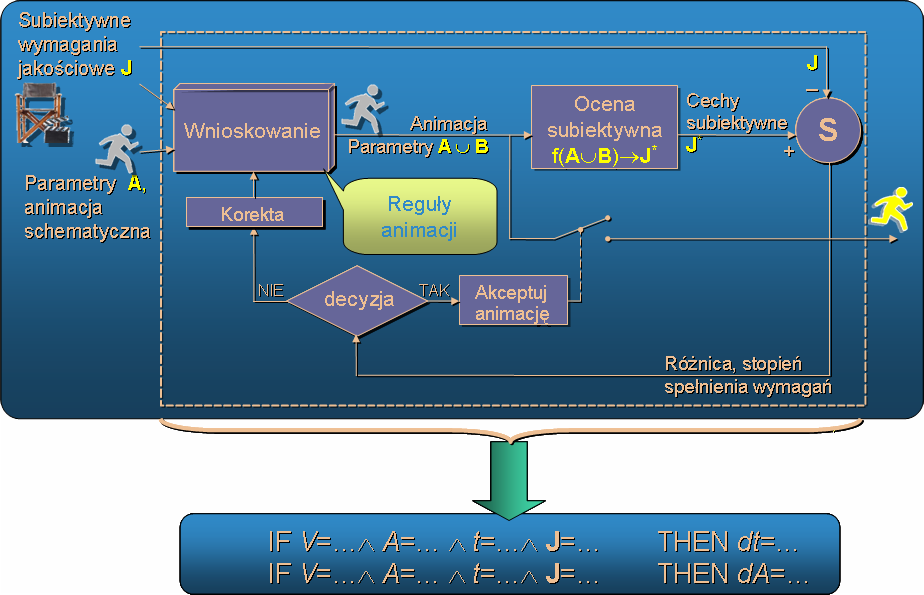
Zastąpienie procesu wielokrotnego poprawiania animacji odpowiednim mechanizmem wnioskowania
Z wspomnianych na wstępie reguł animacji uzyskane są dwie najważniejsze wskazówki:
- szybki ruch o dużej amplitudzie powinien być poprzedzony dużą antycypacją i zakończony dużym przerzutem
- długi ruch powinien być poprzedzony długą antycypacją i długim przerzutem
Czynność opisana parametrami A={V, A, t} po dodaniu do niej dodatkowych faz opisanych parametrami B={dA, dA}, wykonywana jest wobec tego w różny sposób w zależności od alfa i beta.
Zachodzi konieczność powiązania wartości alfa, beta z uzyskiwanymi subiektywnymi cechami animacji. W tym celu wykorzystana zostanie funkcja oceny.
Funkcja oceny
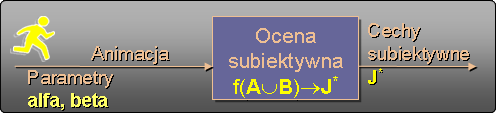
Sformułowana została funkcja oceny, która animacji o zadanych współczynnikach proporcji alfa i beta przypisuje opis słowny cech płynności, stylu i jakości ruchu. Tylko w procesie oceny subiektywnej z udziałem licznej grupy widzów możliwe jest przypisanie animacjom o różnych wartościach alfa, beta opisów w postaci wektora cech jakościowych J. Proces oceny zapisać można jako:
Dla podanych wcześniej zależności dA i dt od alfa i beta możliwe jest przekształcenie powyższej funkcji do postaci uwgzlędniających wektory parametrów:
czyli przypisywania animacji opisanej parametrami A i B grupy ocen J.
Testy oceny subiektywnej
- 30 widzów
- Wyniki są istotne statystycznie
- Przeprowadzono etap treningu:
- zaznajomienie z tematyką badań, stosowaną terminologią
- prezentacja wielu wersji animacji faz ruchu
- Uczestników można więc uznać za ekspertów!
- Stosowana skala ocen:
- płynność={skokowa, pośrednia, płynna}
- styl={naturalny, pośredni, komiksowy}
- jakość={1,2,3,4,5}
dt=g(beta·V·t), gdzie: g(x)=10·tgh(x / 0,125)
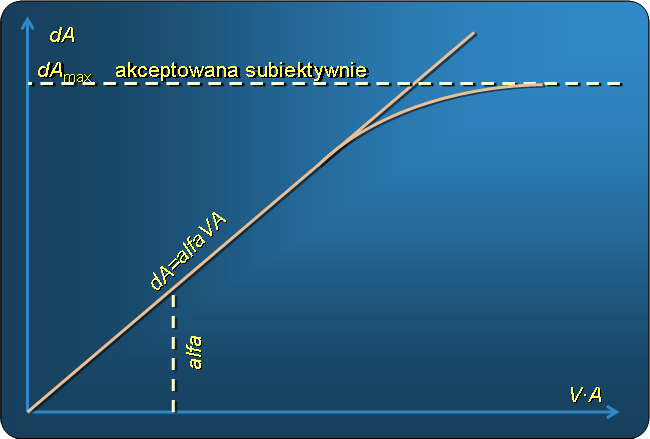
Ograniczenie przedziałów zmienności parametrów, poprzez zastosowanie funkcji nasycenia
Określona eksperymentalnie korelacja między parametrami
Wygenerowano animacje przejścia między dwiema pozami, w których wykorzystane były różne wartości współczynników alfa i beta. Animacje zostały ocenione subiektywnie w celu określenia korelacji między subiektywnymi i obiektywnymi parametrami ruchu. W tabeli poniżej pogrubieniem zaznaczono wysokie wartości współczynnika korelacji. Parametr beta wykazuje silny wpływ na stopień płynności i jakości animacji, alfa na jej styl, a wysoka płynność implikowała wysoką ocenę jakości animacji.
Oceniane animacje wygenerowano i badano dla wartości współczynników:
alfa={0,1; 0,2; ...; 1,2; 1,3}
beta={1,2,3,4,5,6,7}
Stosowane skale ocen były następujące:
płynność={skokowa, pośrednia, płynna}
styl={naturalny, pośredni, komiksowy}
jakość={1,2,3,4,5}

Przykłady ruchu z małymi i dużymi wartościami alfa i beta.
Różne wartości alfaMałe alfa, ruch naturalny. Duże alfa, ruch przejaskrawiony |
Różne wartości betaMałe beta, ruch skokowy. Duże beta, ruch płynny |
Określanie funkcji odwrotnej do funkcji oceny
W modelu animacji funkcja oceny przedstawiona jest następująco:
Funkcja odwrotna do funkcji oceny ma postać:
Przedstawiona na rysunku część modelu realizacji animacji wymaga przetworzenia do postaci , która pozwoli w oparciu o wektory J i A wyznaczyć B:
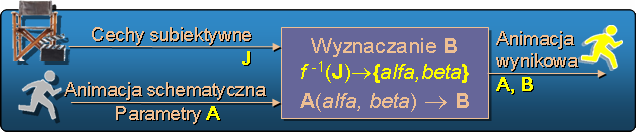
Szczegóły wyznaczania funkcji odwrotnej zawarte są w artykule. Wynikiem są reguły określania wartości alfa i beta dla zadanych J={styl, płynność}.

Wyznaczanie reguł rozmytych
Ostatecznie poszukiwane są zależności łączące wartości wejściowych parametrów animacji, czyli wektora A oraz założeń subiektywnych J z parametrami faz dodatkowych B (nie zaś z alfa i beta). Zależności te przedstawić można jako szereg działań algebraicznych, w których na postawie określonego J wyznaczane są alfa, beta, następnie na podstawie V, a, t okreslane są dA i dt. Działania te zamienione zostają na zadania w logice rozmytej o następującej postaci:
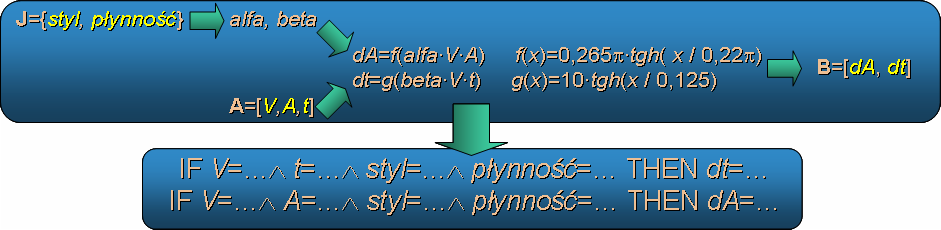
W ten sposób powstają reguły o postaci np:
Dla systemu wnioskowania rozmytego funkcje przynależności parametrów ruchu określane są w sposób subiektywny. Szczegóły zawarte są w artykule.
Model rozmyty
Zależności wartości dA od parametrów wejściowych do systemu wnioskowania przedstawione są na rysunku w postaci powierzchni modelu. Dzięki zdolnościom interpolacyjnym wnioskowania rozmytego uzyskiwane są płynne zmiany wartości oraz możliwe jest określenie wartości poza tzw. punktami podparcia, tj. dla wartości zmiennych wejściowych, które nie były uwzględniane w tworzeniu bazy reguł.
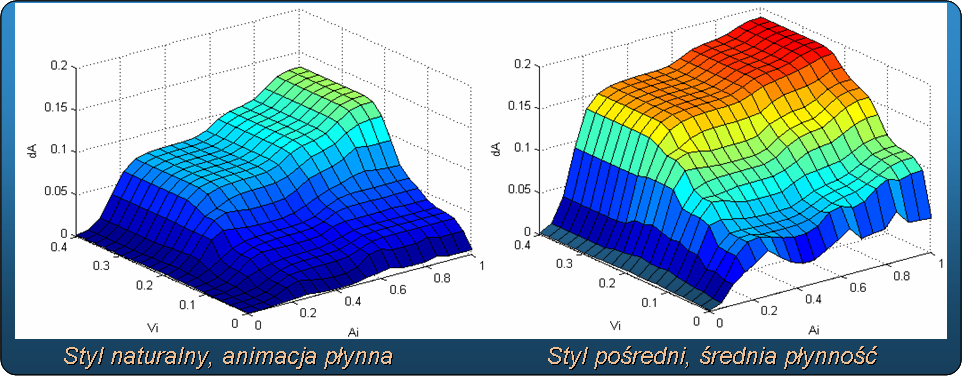
Analiza powierzchni modelu rozmytego dA (zależne od styl, płynność, A, V)
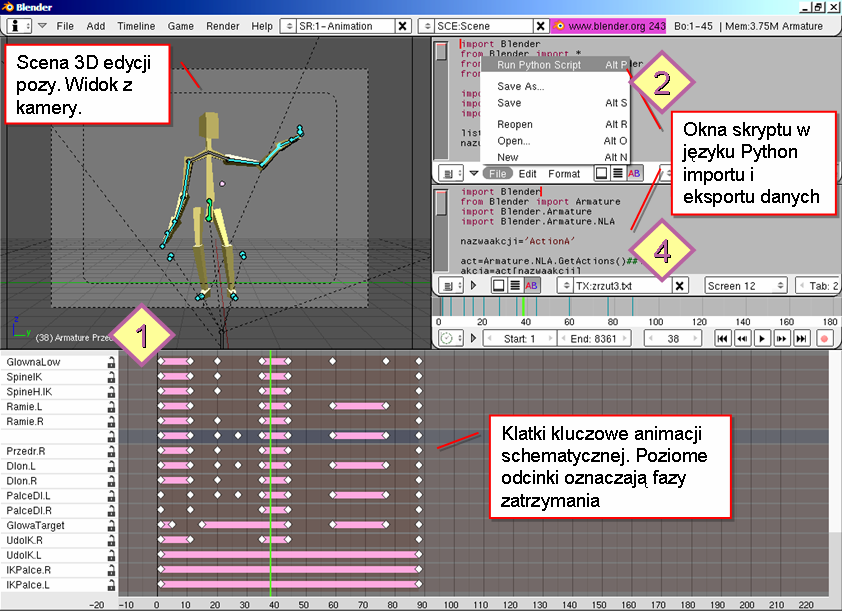
System wspomagania komputerowej animacji postaci
Zaprojektowany system przedstawiony jest poniżej. Praca z nim przebiega w sposób następujący:
- W aplikacji Blender projektowana jest prototypowa wersja animacji.
- Dane animacji zapisywane są w formacie obsługiwanym przez moduł wnioskowania za pomocą skryptu eksportu danych.
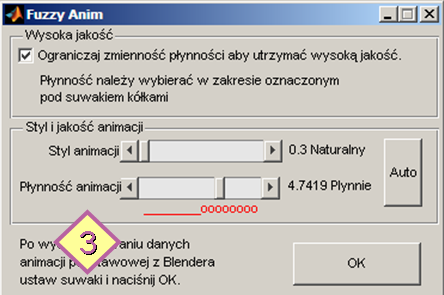
- Moduł wnioskowania udostępnia możliwość regulacji stylu i płynności animacji. Po zakończeniu analizy danych prototypowej animacji oraz oczekiwań użytkownika, tworzone są dane nowej animacji.
- Skrypt importowania danych odczytuje dane nowej animacji i wprowadza odpowiednie zmiany. W oknie 3D można podejrzeć wynikową animację.